卡尔曼滤波理论与应用
卡尔曼滤波理论与应用
!!! tip
Contents:卡尔曼滤波(Kalman Filtering)
Contributor: YJY
Email:522432938@qq.com
如有错误,请批评指正。
!!! note
一篇[卡尔曼滤波的英文博客](http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/),兼具理论与感性认识。
上述博客的[中文翻译](https://blog.csdn.net/u010720661/article/details/63253509)版本
卡尔曼滤波介绍
一句简单的话概括卡尔曼滤波:综合考虑模型计算值与实际测量值,估计动态系统中状态的真实值。
对这句概括的话,提出2个问题:
- 为什么要综合考虑模型计算值和实际测量值?
- 如何综合考虑?
对于问题1,有2个事实:
- 模型不是准确的。例如,欧姆定律中,电阻值真的是一个常数吗?基础模型尚且如此,更不用说复杂系统的模型了。所以,描述系统的模型,一定是有偏差的。
- 测量值不代表真实值。通过各种仪表读数时,读出来的数不能代表真实值,读数时会有各种随机误差。
所以,Kalman觉得可以结合模型计算值与观测值,对状态的真实值进行估计。
对于问题2:
综合考虑的方式为:先通过状态空间方程的计算出结果,再对结合误差对结果进行修正。由此可见,卡尔曼滤波是控制学与统计学的交叉学科方法。
卡尔曼滤波的数学表达
只给结论,不推导。
其中:
- 下表代表时刻
- 系统状态向量——(行向量)
- 系统状态转移矩阵——,如果在时间域上不变则为——
- 模型噪声——
- 模型噪声矩阵(描述噪声对变量的影响)——(行向量)
- 系统量的测向量——
- 量测矩阵——(行向量)
- 模型噪声——
同时,噪声满足正态分布:
下面为卡尔曼滤波的滤波过程:
Step1 模型计算:
Step2 滤波:
其中:
- 系统的量测的协方差矩阵——
- 滤波后的系统状态向量——
- 滤波后的系统状态向量——
- 模型噪声的方差——,如果在时间域上不变则为——
- 测量噪声的方差——,如果在时间域上不变则为——
- 滤波后的系统的量测的协方差矩阵——
- 测量值向量——
- 模型噪声——
卡尔曼滤波实例
考虑加热器:$$\frac{dT}{dt} = -(T-20) + 10$$
即散热系数为1,加热功率为10,环境温度为20。
使用DifferentialEquations.jl获得仿真数据并加上扰动。
using DifferentialEquations
using Statistics, Plots
f(u, t, p) = -(u - 20) + 10
prob = ODEProblem(f, 20.0, (0, 5))
sol = solve(prob, saveat=0.1)
noise = rand(-0.5:0.0001:0.5, length(sol.u))
cov(noise)
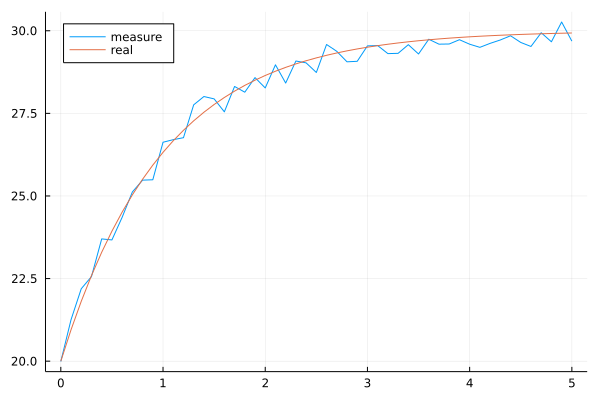
measureT = noise + sol.u
t = collect(0:0.1:5)
plot(t, measureT, label="measure", legend_position=:topleft)
plot!(t, sol.u, label="real", legend_position=:topleft)
获得的measureT将作为未来每个时间点上的温度测量数据(实际为精确解加随机误差生成的数据)。真实值与测量值如下图。
若取,使用欧拉法离散,则上述微分则转变为状态空间方程:$$T_{k+1} = 0.9T_k+3$$
若采用上述状态空间方程,则可以称之为“完美模型”。
为了验证卡尔曼滤波的有效性,我们设计一个十分错误的模型:$$T_{k+1} = T_k$$
即,我们认为这是一个温度不变的系统(错得不能再错的模型)。同时,给一个比较大的,说明模型扰动的方差比较大。
begin
F = 1
Γ = 0.1
H = 1
Qv = 0.8
Qw = 10
P = 10
x = 20.0
x_res = zeros(1, length(measureT))
p_res = zeros(1, length(measureT))
p_res[:, 1] = [P]
x_res[:, 1] = [x]
for i in 1:length(measureT)-1
_P = F * p_res[1, i] * F' .+ Γ' * Qw * Γ
_G = _P * H * inv(H * _P * H + Qv)
_x = F * x_res[1, i]
global x_res[1, i+1] = _x + _G * (measureT[i+1] - H' * _x)
global p_res[1, i+1] = (1 - _G' * H) * _P
end
plot!(t, x_res[1, :], label="Wrong Model", legend_position=:topleft)
end
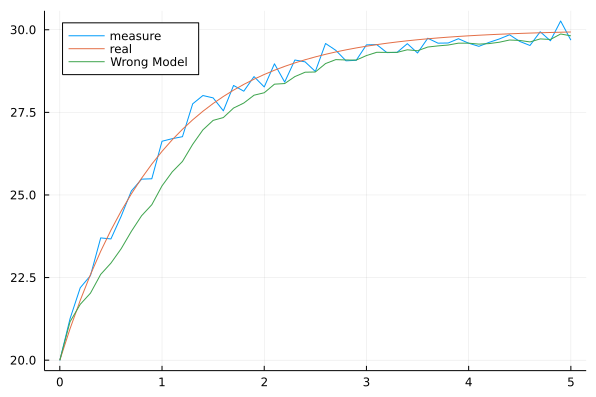
结果显示,居然和真实值差不多。如果令,给得比较小。则变成了:
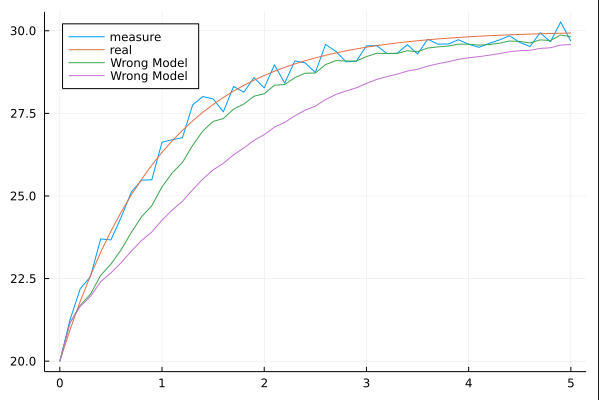
没那么好,但也不差(比直线好太多了)。
如果把模型设置成原本的模型则:
begin
F = 0.9
Γ = 0.1
H = 1
Qv = 0.8
Qw = 10
P = 10
x = 20.0
x_res = zeros(1, length(measureT))
p_res = zeros(1, length(measureT))
p_res[:, 1] = [P]
x_res[:, 1] = [x]
for i in 1:length(measureT)-1
_P = F * p_res[1, i] * F' .+ Γ' * Qw * Γ
_G = _P * H * inv(H * _P * H + Qv)
_x = F * x_res[1, i] + 3
global x_res[1, i+1] = _x + _G * (measureT[i+1] - H' * _x)
global p_res[1, i+1] = (1 - _G' * H) * _P
end
plot!(t, x_res[1, :], label="Right Model", legend_position=:topleft)
end
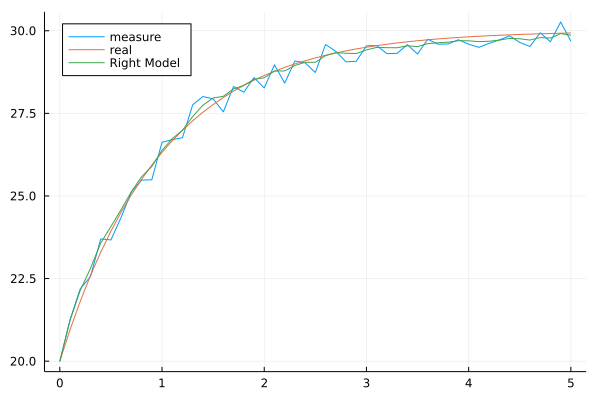
基本就一致了。
小结
卡尔曼滤波的重要意义是利用了测量值带来的信息。模型不准确的时候,利用滤波带来的效果,可以对模型进行一个矫正。
但它的缺点在于,对预测没有帮助。对未来的多点预测只能是通过模型。既然是预测,说明事情还没有发生,那测量值无法获得,也就无法通过测量值进行矫正。
其特点是,对已经发生的事情做一个优化,而不能提升预测未来的能力。