MTK求解MPC问题
MTK求解MPC问题
!!! tip
Contents:MTK、Control
Contributor: YJY
Email:522432938@qq.com
如有错误,请批评指正。
!!! note
MPC = Model Predict Control
MTK = ModelingToolkit.jl
[OptimizationSystem](https://mtk.sciml.ai/stable/tutorials/optimization/)为MTK中的系统类型之一
MTK中的ControlSystem
在ModellingToolkit的Optimal Control中,有关于ControlSystem的描述。但经过实验测试,ControlSystem并不能很好地求解“过程控制量”的值。
因为MTK使用runge_kutta_discretize(龙格库塔离散)函数将问题离散。问题离散后,传入OptimizationSystem,而OptimizationSystem目前有一个缺陷——不能接受问题的约束。所以,即使用龙格库塔离散离散出控制过程中的多个状态量,在变量没有约束时,优化结果没有意义。(离散的概念在微分方程参数辨识中有提及)
在实例过后,这一点会有清晰的体现。
MTK中的OptimizationSystem
为了简单起见,手动构建一个MPC优化问题,通过OptimizationSystem来求解。通过构建优化目标方程,调用不同优化器求解该优化问题。那么从控制问题到优化问题这一过程可以看成是手动离散。相当于自己实现了runge_kutta_discretize。构建完优化问题,就可以直接把它推给OptimizationProblem求解,这是可以做到的。
上述过程的核心就是把控制中的状态量手写出来。
可行的做法是,通过MTK符号建模体系建立优化变量,同时构建Loss方程关于优化变量的符号表达。通过OptimizationSystem生成用符号体系构建的优化问题,把构建的OptimizationSystem推给OptimizationProblem,最后选择合适的求解器求解。
实例:加热器问题
问题描述
现在有一个物体加热,它的温度由加热项和散热项决定。α是散热系数,β是加热系数,环境温度为。那么控制方程:
现在可以改变加热功率,那么我们构建一个优化问题:调节加热功率,使得物体的温度从开始,迅速上升并且稳定在某一个温度(比如说58℃)。问题的数学表达为,通过优化控制变量 使得损失函数最小:
而就是未来一段时间域内,不同时间点上的控制量(控制科学中称为状态量)。通过改变这些值,能够控制温度的走势,这是控制的内涵。若使温度达到一个让人满意的状态(这里是维持在58℃,也可以是使温度线性上升等等),这是最优控制的内涵。
所以,最优控制或者模型预测控制最根本的数学内涵是优化——多变量优化。这也是为什么能用OptimizationProblem来处理控制问题。
构建问题
首先明确问题。现在假设以一个恒定功率(p=80)加热物体,环境温度18℃,初始温度20℃,散热系数α = 0.2,加热系数β = 0.1。先求解该问题。
using Plots,DifferentialEquations
Tout = 18.0
α = 0.2
β = 0.1
f(x,p,t) = α*(Tout - x) + β*p
tspan=(0.0,40.0)
u0 = 20.0
p = 80.0
pr = ODEProblem(f,u0,tspan,p)
sol = solve(pr)
plot(sol,ylimit=(10,60))
得到的结果是: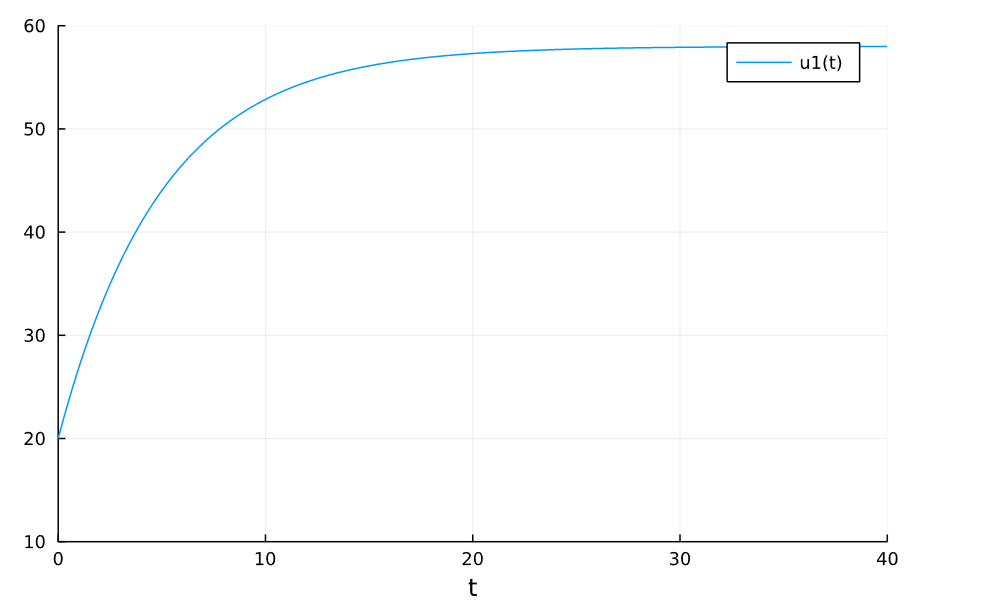
很清晰可以看到,温度缓慢上升最后稳定在58℃。那么作为我们拍脑袋的控制策略来说,这个控制问题很简单。我们可以先让功率在前期比较大(比如说150),等温度到了58℃附近,再把功率调回80,就可以实现“温度迅速上升并最后稳定在58度”。
优化求解
using Symbolics,ModelingToolkit,GalacticOptim,Optim
N = 20
Tout = 18.0
T0 = 20.0
dt = 4/N
Loss = 0.0
T = T0
α = 0.2
β = 0.1
@variables u[1:N]
for i = 1:N
global T = T + (α*(Tout - T) + β*u[i])*dt
global Loss += (T - 58.0)^2
end
u是符号量,离散的个数为N,上面选择离散为20个变量。通过一个for循环,就可以迭代求解20个点上的温度值并且构建Loss方程。这里的20个变量,就是控制的核心,通过改变这20个不同时间点上的控制量(加热功率)的值,使得被控量(温度)接近“更好、更快”地接近目标——58℃。
可以看到Loss方程的结果:
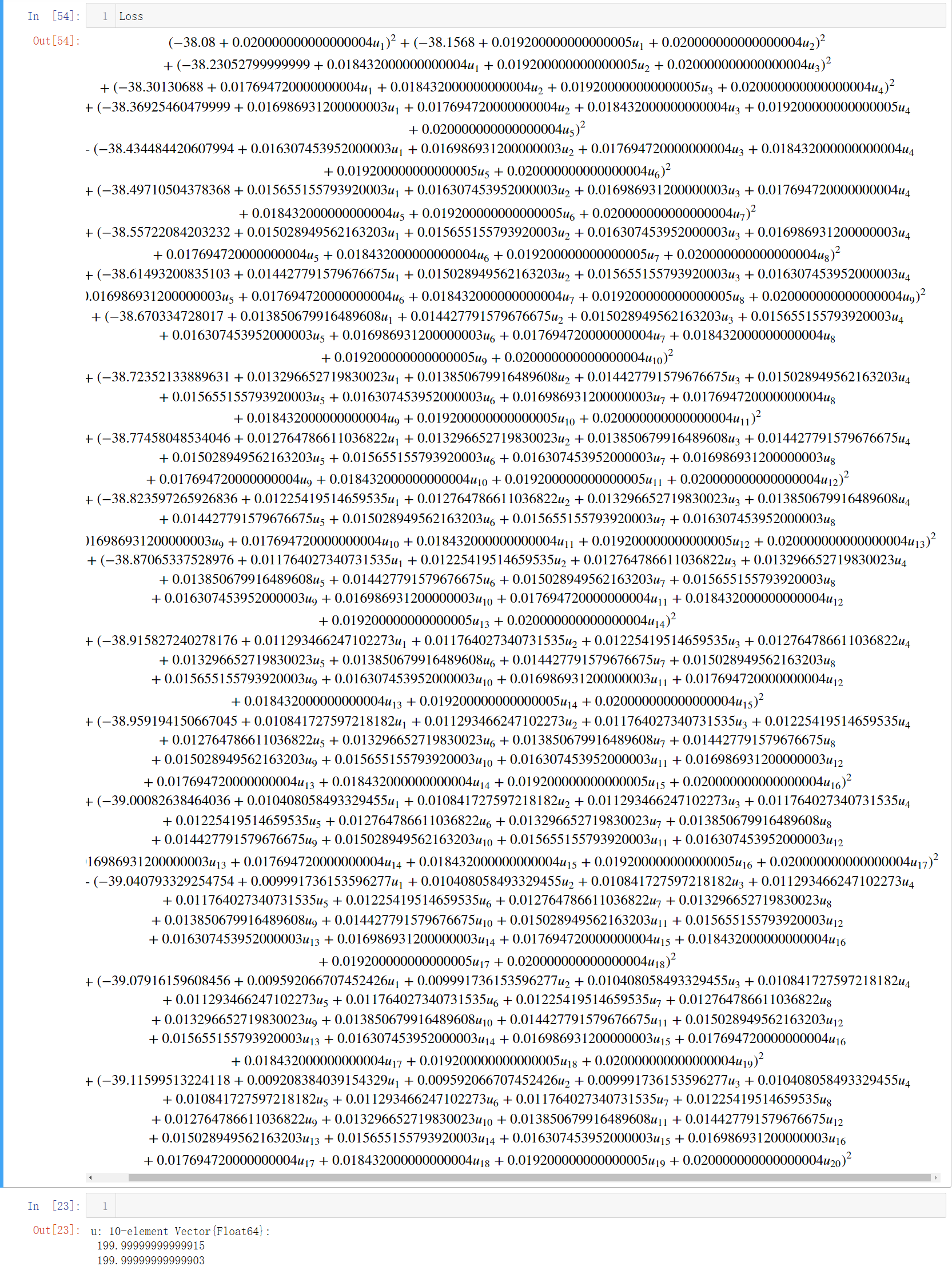
有些许复杂,但在情理之中。
@named sys = OptimizationSystem(Loss,[u[i] for i in 1:N],[],inequality_constraints=inequ)
u0 = [u[i] => 1.0 for i in 1:N]
lb = [0.0 for i in 1:N]
ub = [200.0 for i in 1:N]
prob = OptimizationProblem(sys,u0,[],lb = lb,ub = ub,grad=true,hess=true)
s = solve(prob,Optim.LBFGS())
然后构建System和OptimizationProblem,给定上下限。这里功率上限设为200,最后求解!
结果为:
u: 20-element Vector{Float64}:
199.99999999999997
199.99999999999997
199.99999999999997
199.99999999999997
199.99999999999997
199.99999999999997
199.99999999999997
199.99999999999994
199.99999999999991
199.9999999999999
199.99999999999957
199.99999999996504
82.18673442597857
79.99995550035416
80.0000502201614
79.99991729083732
80.00001272875645
80.00004827285969
79.99999940246633
79.99997217751334
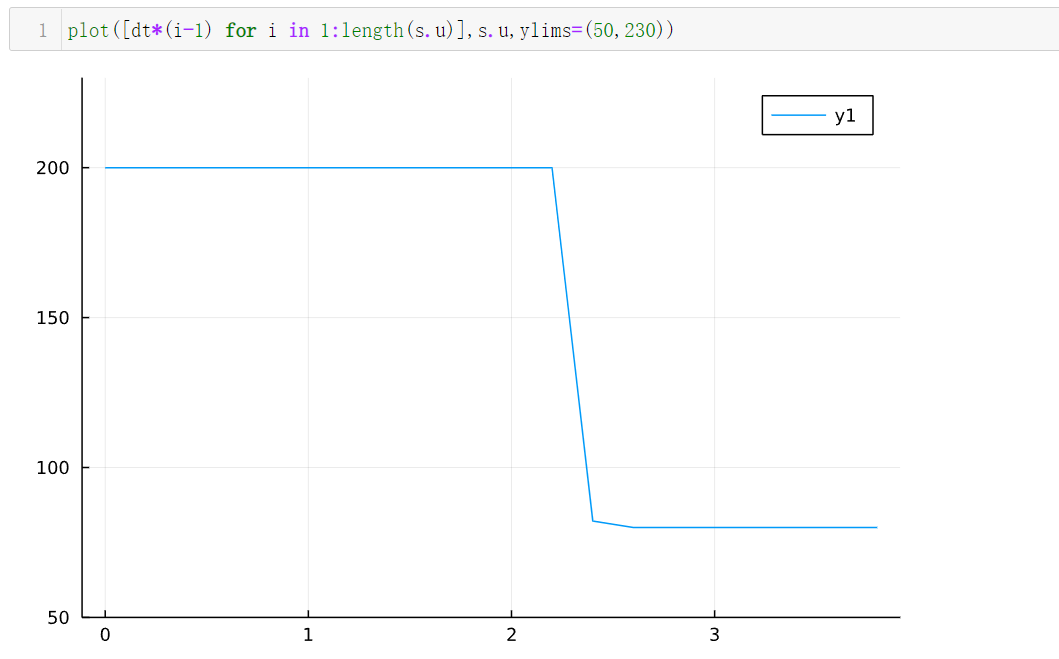
应该说是非常理想的。和我们设想的一样。先以最大功率加热到58℃附近,然后迅速将到稳态维持58℃的功率80,这样2s就完成了控制过程,而之前以恒定功率80加热,耗费了20s!
从图中可以很容易看出局限性,加热功率先猛加,以最高限度200直接加热到58,然后功率在恒定在80维持恒温58摄氏度。这种直上直下的调节,很显然不那么让人满意。可以想象,假如不给变量设置上下限,那么优化的结果一定是:第一个离散的变量加热功率上万,相当于在一瞬间使用超大且精准的功率把温度加到58摄氏度。第二个往后的状态量为80——维持恒温58摄氏度的加热功率。
这在数学上是合理的,在实际中却没有意义。所以在控制中一般需要加一些约束,比如加热功率上下限、加热功率变化幅度。
所以,为了处理约束,可以使用JuMP来做MPC。